Use the epsilon-delta definition to prove the limit laws
Describe the epsilon-delta definitions of one-sided limits and infinite limits
We now demonstrate how to use the epsilon-delta definition of a limit to construct a rigorous proof of one of the limit laws. The triangle inequality is used at a key point of the proof, so we first review this key property of absolute value.
Definition
The triangle inequality states that if [latex]a[/latex] and [latex]b[/latex] are any real numbers, then [latex]|a+b|\le |a|+|b|[/latex].
Proof
We prove the following limit law: If [latex]\underset{x\to a}{\lim}f(x)=L[/latex] and [latex]\underset{x\to a}{\lim}g(x)=M[/latex], then [latex]\underset{x\to a}{\lim}(f(x)+g(x))=L+M[/latex].
Let [latex]\varepsilon >0[/latex].
Choose [latex]\delta_1>0[/latex] so that if [latex]0<|x-a|<\delta_1[/latex], then [latex]|f(x)-L|<\varepsilon/2[/latex].
Choose [latex]\delta_2>0[/latex] so that if [latex]0<|x-a|<\delta_2[/latex], then [latex]|g(x)-M|<\varepsilon/2[/latex].
We now explore what it means for a limit not to exist. The limit [latex]\underset{x\to a}{\lim}f(x)[/latex] does not exist if there is no real number [latex]L[/latex] for which [latex]\underset{x\to a}{\lim}f(x)=L[/latex]. Thus, for all real numbers [latex]L[/latex], [latex]\underset{x\to a}{\lim}f(x)\ne L[/latex]. To understand what this means, we look at each part of the definition of [latex]\underset{x\to a}{\lim}f(x)=L[/latex] together with its opposite. A translation of the definition is given in the table below.
Translation of the Definition of [latex]\underset{x\to a}{\lim}f(x)=L[/latex] and its Opposite
Definition
Opposite
1. For every [latex]\varepsilon >0[/latex],
1. There exists [latex]\varepsilon >0[/latex] so that
2. there exists a [latex]\delta >0[/latex] so that
2. for every [latex]\delta >0[/latex],
3. if [latex]0<|x-a|<\delta[/latex], then [latex]|f(x)-L|<\varepsilon[/latex].
3. There is an [latex]x[/latex] satisfying [latex]0<|x-a|<\delta[/latex] so that [latex]|f(x)-L|\ge \varepsilon[/latex].
Finally, we may state what it means for a limit not to exist. The limit [latex]\underset{x\to a}{\lim}f(x)[/latex] does not exist if for every real number [latex]L[/latex], there exists a real number [latex]\varepsilon >0[/latex] so that for all [latex]\delta >0[/latex], there is an [latex]x[/latex] satisfying [latex]0<|x-a|<\delta[/latex], so that [latex]|f(x)-L|\ge \varepsilon[/latex]. Let’s apply this in the example to show that a limit does not exist.
Example: Showing That a Limit Does Not Exist
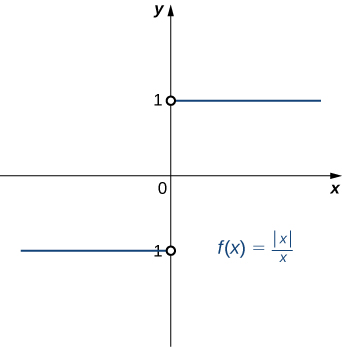
Show that [latex]\underset{x\to 0}{\lim}\dfrac{|x|}{x}[/latex] does not exist. The graph of [latex]f(x)=\dfrac{|x|}{x}[/latex] is shown here:
Figure 4.
Show Solution
Suppose that [latex]L[/latex] is a candidate for a limit. Choose [latex]\varepsilon =\frac{1}{2}[/latex].
Let [latex]\delta >0[/latex]. Either [latex]L\ge 0[/latex] or [latex]L<0[/latex]. If [latex]L\ge 0[/latex], then let [latex]x=-\delta/2[/latex]. Thus,
Thus, for any value of [latex]L[/latex], [latex]\underset{x\to 0}{\lim}\frac{|x|}{x}\ne L[/latex].
Watch the following video to see the worked solution to Example: Showing That a Limit Does Not Exist.
Closed Captioning and Transcript Information for Video
For closed captioning, open the video on its original page by clicking the Youtube logo in the lower right-hand corner of the video display. In YouTube, the video will begin at the same starting point as this clip, but will continue playing until the very end.
Now that we have proven limits, we can now apply them with actual numbers for [latex]\varepsilon[/latex] and [latex]\delta[/latex]. Think of [latex]\varepsilon[/latex] as the error in the [latex]x[/latex]-direction and [latex]\delta[/latex] to be the error in the [latex]y[/latex]-direction. These have applications in engineering when these errors are considered tolerances. We want to know what the error intervals are, and we are trying to minimize these errors.
Example: Finding deltas algebraically, Part 1
Find an open interval about [latex]x_0[/latex] on which the inequality [latex]|f(x)-L| < 0[/latex] holds. Then give the largest value [latex]\delta > 0[/latex] such that for all [latex]x[/latex] satisfying [latex]0 < |x-x_0| < \delta[/latex] the inequality [latex]|f(x)-L| < \varepsilon[/latex] holds.
First we will need to start with the inequality [latex]|f(x)-L| < \varepsilon[/latex] and plug in our numbers. Then we will solve for x.[latex]|2x-8 - 6| < \varepsilon[/latex][latex]|2x-14| < \varepsilon[/latex][latex]-0.14 < 2x - 14 < 0.14[/latex][latex]13.86 < 2x < 14.14[/latex][latex]6.93 < x < 7.07[/latex]Therefore, the interval is [latex](7.93,8.07)[/latex]For the second answer, we will start with [latex]0 < |x-x_0| < \delta[/latex]. We will plug in our value and solve:[latex]|x-7| < \delta[/latex][latex]-\delta < x-7 < \delta[/latex][latex]7-\delta < x < 7+\delta[/latex]Now we will set each piece equal to the endpoints we found above.[latex]7-\delta=7.93[/latex] and [latex]7+\delta=8.07[/latex]After solving we will get the same answer for each equation: [latex]\delta=0.07[/latex].
Example: Finding deltas algebraically, Part 2
Find an open interval about [latex]x_0[/latex] on which the inequality [latex]|f(x)-L| < 0[/latex] holds. Then give the largest value [latex]\delta > 0[/latex] such that for all [latex]x[/latex] satisfying [latex]0 < |x-x_0| < \delta[/latex] the inequality [latex]|f(x)-L| < \varepsilon[/latex] holds.
First we will need to start with the inequality [latex]|f(x)-L| < \varepsilon[/latex] and plug in our numbers. Then we will solve for x.[latex]|\sqrt(x+4) - 3| < \varepsilon[/latex][latex]|\sqrt{x+4} - 3| < 1[/latex][latex]-1 < \sqrt{x+4} - 3 < 1[/latex][latex]2 < \sqrt{x+4} < 4[/latex][latex]4 < x + 4 < 16[/latex][latex]0 < x + 4 < 12[/latex]Therefore, the interval is [latex](0,12)[/latex].For the second answer, we will start with [latex]0 < |x-x_0| < \delta[/latex]. We will plug in our value and solve:[latex]|x-5| < \delta[/latex][latex]-\delta < x-5 < \delta[/latex][latex]5-\delta < x < 5+\delta[/latex]Now we will set each piece equal to the endpoints we found above.[latex]5-\delta=0[/latex] and [latex]5+\delta=12[/latex]
After solving we will get [latex]\delta=5 \text{ and }\delta=7[/latex]. Since the question is asking for the smallest interval, we choose the smaller number. Therefore the answer is [latex]\delta=5[/latex].
One-Sided and Infinite Limits
Just as we first gained an intuitive understanding of limits and then moved on to a more rigorous definition of a limit, we now revisit one-sided limits. To do this, we modify the epsilon-delta definition of a limit to give formal epsilon-delta definitions for limits from the right and left at a point. These definitions only require slight modifications from the definition of the limit. In the definition of the limit from the right, the inequality [latex]0
Definition
Limit from the Right: Let [latex]f(x)[/latex] be defined over an open interval of the form [latex](a,b)[/latex] where [latex]a
[latex]\underset{x\to a^+}{\lim}f(x)=L[/latex]
if for every [latex]\varepsilon >0[/latex], there exists a [latex]\delta >0[/latex] such that if [latex]0
Limit from the Left: Let [latex]f(x)[/latex] be defined over an open interval of the form [latex](a,b)[/latex] where [latex]a
[latex]\underset{x\to b^-}{\lim}f(x)=L[/latex]
if for every [latex]\varepsilon >0[/latex], there exists a [latex]\delta >0[/latex] such that if [latex]0
Example: Proving a Statement about a Limit From the Right
Prove that [latex]\underset{x\to 4^+}{\lim}\sqrt{x-4}=0[/latex].
Show Solution
Let [latex]\varepsilon >0.[/latex]
Choose [latex]\delta =\varepsilon^2[/latex]. Since we ultimately want [latex]|\sqrt{x-4}-0|<\varepsilon[/latex], we manipulate this inequality to get [latex]\sqrt{x-4}<\varepsilon[/latex] or, equivalently, [latex]0
Figure 5. This graph shows how we find [latex]\delta[/latex] for the proof of this example.
Watch the following video to see the worked solution to Example: Proving a Statement about a Limit From the Right.
Closed Captioning and Transcript Information for Video
For closed captioning, open the video on its original page by clicking the Youtube logo in the lower right-hand corner of the video display. In YouTube, the video will begin at the same starting point as this clip, but will continue playing until the very end.
Find [latex]\delta[/latex] corresponding to [latex]\varepsilon[/latex] for a proof that [latex]\underset{x\to 1^-}{\lim}\sqrt{1-x}=0[/latex].
Hint
Sketch the graph and use Figure 5 as a solving guide.
Show Solution
[latex]\delta =\varepsilon^2[/latex]
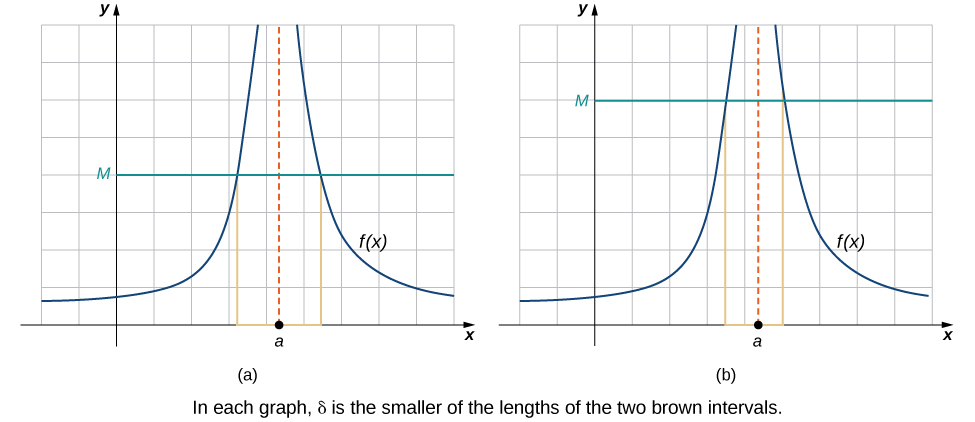
We conclude the process of converting our intuitive ideas of various types of limits to rigorous formal definitions by pursuing a formal definition of infinite limits. To have [latex]\underset{x\to a}{\lim}f(x)=+\infty[/latex], we want the values of the function [latex]f(x)[/latex] to get larger and larger as [latex]x[/latex] approaches [latex]a[/latex]. Instead of the requirement that [latex]|f(x)-L|<\varepsilon[/latex] for arbitrarily small [latex]\varepsilon[/latex] when [latex]0<|x-a|<\delta[/latex] for small enough [latex]\delta[/latex], we want [latex]f(x)>M[/latex] for arbitrarily large positive [latex]M[/latex] when [latex]0<|x-a|<\delta[/latex] for small enough [latex]\delta[/latex]. Figure 6 illustrates this idea by showing the value of [latex]\delta[/latex] for successively larger values of [latex]M[/latex].
Figure 6. These graphs plot values of [latex]\delta[/latex] for [latex]M[/latex] to show that [latex]\underset{x\to a}{\lim}f(x)=+\infty[/latex].
Definition
Let [latex]f(x)[/latex] be defined for all [latex]x\ne a[/latex] in an open interval containing [latex]a[/latex]. Then, we have an infinite limit
if for every [latex]M>0[/latex], there exists [latex]\delta >0[/latex] such that if [latex]0<|x-a|<\delta[/latex], then [latex]f(x)>M[/latex].
Let [latex]f(x)[/latex] be defined for all [latex]x\ne a[/latex] in an open interval containing [latex]a[/latex]. Then, we have a negative infinite limit